您當前的位置:檢測資訊 > 科研開發
嘉峪檢測網 2024-09-03 13:23
[摘要]電控空氣懸架系統(electrically controlled air suspension,ECAS)具有調節懸架剛度和車身高度的功能,可有效改善車輛乘坐舒適性和操縱穩定性。以某乘用車ECAS為對象,利用分數階理論描述橡膠氣囊的黏彈性阻尼特性,考慮等效阻尼及滯回特性對其熱力學模型進行了優化,結果與實驗數據吻合良好,驗證了優化后的空氣彈簧模型的精確性。在此基礎上,考慮車輛縱橫向動力學特性與Dugoff 輪胎模型,建立14 自由度整車ECAS 動力學模型,提出模型預測(model predictive control,MPC)主動懸架控制方法,以可測變量為控制器輸入,實現直線及轉向行駛工況下的主動控制。仿真與整車臺架實驗研究表明,分數階修正模型可以很好地反映ECAS 變剛度特性,基于MPC 的主動懸架控制策略能實時調整空氣彈簧剛度,控制車身姿態,有效改善電動汽車行駛時的平順性與穩定性。論文的研究方法為車輛懸架系統建模及主動控制提供了一種新思路。
關鍵詞:空氣懸架;熱力學;黏彈性阻尼;分數階;模型預測控制
前言
隨著電子技術的發展和制造成本的降低,電控技術在汽車行業得到了廣泛應用,電控空氣懸架系統(electrically controlled air suspension,ECAS)是其典型代表。作為當前最先進的懸架系統之一,ECAS能實時調節懸架剛度[1],具有更低的固有頻率、更理想的非線性特性等[2-3],使得車輛能適應不同的路況、車輛負載和行駛速度,極大地改善了行駛性能,而如何準確、快速地調節空氣彈簧剛度,成為當前研究的重點。
空氣彈簧的剛度特性受氣壓、激勵頻率和幅值等諸多因素的影響,常見的空氣彈簧的非線性模型有多項式模型及熱力學簡化模型。多項式模型一般采用三次多項式對空氣彈簧剛度的幅頻特性進行描述,馮霏等[4]、盛云等[5]都曾采用三次多項式,分別利用多尺度法、增量諧波平衡法等分析了汽車懸架系統的2 自由度非線性振動系統的振動特性。尹萬建等[6]指出汽車系統中,空氣彈簧剛度的頻變現象并不明顯,故可用三次多項式對空氣彈簧剛度特性進行描述,但這類模型沒有考慮橡膠氣囊黏彈性特性的影響。熱力學簡化模型是應用最廣的建模方法,將空氣彈簧的力學模型分解為彈性力及黏性阻尼力兩部分,其中黏性阻尼力存在非線性阻尼力以及慣性力,Zhu等[7]基于Berg模型增加了對空氣彈簧摩擦特性的描述,提出摩擦力由減振桿和氣缸之間的相對運動以及橡膠材料顆粒產生。鄔明宇等[8]針對多腔室空氣彈簧提出了一種考慮空氣氣囊熱交換與阻尼滯回特性的力學模型,考慮滯回特性的精確解模型可以很好反映空氣彈簧的動力學特性。Oda 等[9]研究建立了一種附加氣室空氣彈簧力學模型,具有一定的頻率適應性。Docquier 等[10]研究了不同熱交換系數對附加氣室空氣彈簧內部特性的影響,分析了傳熱對動態剛度的影響。陳俊杰等[11]將分數導數Maxwell中建立空氣彈簧模型,用來描述橡膠氣囊的黏彈性特性。目前,針對空氣彈簧力學特性及其模型的研究較多,而將空氣彈簧應用于整車動力學模型控制懸架系統的研究尚不多見。
主動懸架控制一直是研究熱點,常見的控制方法有天棚控制[12-13]、最優控制[14-16]、滑模控制[17]及PID 控制[18]等。車輛在行駛過程中存有諸多不確定性,模型預測控制無須復雜的辨識過程,并且在優化過程利用實測信息不斷矯正,對不確定性環境具有很強適應能力,因此,模型預測控制方法適合用于ECAS。同時,由于空氣彈簧具有響應慢、時滯長等特點,目前多針對汽車行駛時的俯仰運動、側傾運動以及車身高度控制等問題進行研究。Huo 等[19]提出將抑制俯仰運動的控制器作為補充控制模塊,在特定工況下開啟,并基于天棚控制設計PID 控制器控制俯仰角。Eltantawie 等[20]將半車模型分成兩個獨立的1/4 模型,對每個模型設計分散神經模糊控制,優化車輛的垂向響應與俯仰角。Chen 等[21]設計了一款有高流量軟管的空氣懸架系統,可改進貨車在車道變化和穩態轉彎時的操控性和穩定性。上述文獻均取得了一定的成果,但多針對阻尼減振器[22]、油氣懸架[23]等,將空氣彈簧作為控制對象的研究尚不多見。此外,現有關于ECAS 研究多側重于空氣彈簧力學模型優化和車身高度調節等,涉及車輛行駛時側向和縱向的車身姿態控制的研究較為少見。
鑒于此,本文基于熱力學模型推導空氣彈簧的彈性力,利用分數階描述橡膠氣囊的黏彈性阻尼力,以此修正熱力學模型與工程實際中空氣彈簧的差異,通過實驗驗證了模型的準確性。在此基礎上,建立電動汽車整車ECAS 垂向動力學模型,并考慮縱橫向動力學特性與Dugoff 輪胎模型,針對直線與轉向行駛工況,以降低俯仰角加速度與側傾角加速度為控制目標,搭建整車模型預測(MPC)控制器,并通過仿真分析和整車ECAS 實驗驗證了控制策略的有效性。
1、 空氣彈簧力學模型與實驗驗證
1.1 空氣彈簧力學模型
空氣彈簧在工作過程中,氣囊內氣體為多變過程,氣體質量固定時,理想氣體多變過程方程有:

式中:p0 為靜止狀態時空氣彈簧內部的絕對壓力,Pa;V0 為靜止時空氣彈簧氣囊內容積,m3;pe 為任意時刻空氣彈簧內部的絕對壓力,Pa;Ve為任意時刻空氣彈簧氣囊內容積,m3;k 為氣體多變指數,絕熱過程時k取1.4。
空氣彈簧在充放氣調節剛度的過程中,氣體在氣囊內流動時會有做功和焓變,一般充放氣的時間較短,可視為絕熱過程,根據熱力學第一定律有[24]:

式中:W 為空氣彈簧做功;hin、hout 分別為流入、流出空氣彈簧的比焓;qin、qout 分別為流入、流出空氣彈簧的質量流量;Uas表示空氣彈簧的內能。
結合理想氣體狀態方程peVe= mRTe,式(2)可表達為

式中:R 為理想氣體常數,R=287 J/(kg·K);Te 為氣囊內氣體溫度;qm 為質量流量,qm= qin-qout;Cv 為定容比熱容,Cv= R/(k -1)。
式(3)進一步整理為

空氣彈簧運動過程中,有效容積及氣囊內壓作用力為

式中:Ae為空氣彈簧有效承載面積,m2;z1、z2分別為簧上質量、簧下質量位移,m;Fk為氣囊內壓作用力,N。
三次多項式模型、熱力學模型沒有考慮空氣彈簧橡膠氣囊材料的黏彈性阻尼特性,然而空氣彈簧在工作頻率范圍內,由橡膠氣囊黏彈性產生的阻尼效應會影響空氣彈簧的力學響應,因此采用分數階微分對橡膠氣囊黏彈力進行表達[25],以此修正熱力學模型與實際空氣彈簧之間的差異,空氣彈簧力學模型對比如圖1所示。

圖1 空氣彈簧力學模型對比
分數階微積分的定義形式很多,但都較為復雜,一般采用傳遞函數G(S)逼近分數階模型[26]。


1.2 空氣彈簧力學特性實驗
為了驗證基于分數階的空氣彈簧力學模型的準確性,需要對空氣彈簧的動特性進行實驗。某空氣懸架減振總成由空氣彈簧和CDC 減振器串聯組成,相關參數如表1 所示,將減振總成安裝在振動臺上,在減振總成上蓋板與實驗臺架之間安裝力傳感器,如圖2 所示。調節空氣彈簧高度至226 mm,向空氣彈簧充氣達到初始壓強后關閉氣源。對空氣彈簧施加正弦激勵,振幅分別為10、12、15 mm 等,頻率為0.2~1.5 Hz,記錄力與位移數據。本實驗目的是測試減振器總成中空氣彈簧的力學性能,為了消除與其串聯的CDC 減振器的影響,實驗中還測量了相同工況下CDC減振器不通電時的阻尼力。
表1 空氣彈簧力學實驗參數


圖2 減振器總成及空氣彈簧力學特性實驗
空氣彈簧剛度和分數階阻尼系數的計算方法如圖3 所示。空氣彈簧的剛度K 可由滯回曲線的最高點與最低點得出,滯回曲線的面積S=∫Fdx 為空氣彈簧垂向振動過程中消耗的能量。
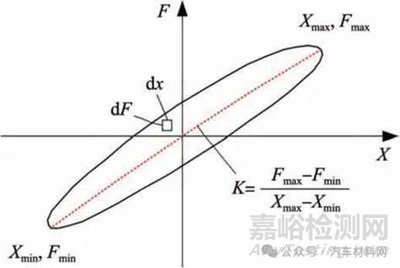
圖3 空氣彈簧滯回曲線
在消除CDC 減振器的影響后,得到空氣彈簧的滯回曲線,調整仿真模型參數與實驗工況一致,限于篇幅,通過仿真得出在載荷為4 900 N 時,僅呈現振幅為10、12 mm,頻率f 為0.8、1.0 Hz 的正弦激勵時的空氣彈簧滯回曲線,如圖4 所示,仿真與實驗結果及其相對誤差如表2所示。
表2 空氣彈簧實驗與仿真結果及相對誤差


圖4 空氣彈簧滯回曲線實驗與仿真對比
由圖4和表2可知,仿真得到的空氣彈簧分數階力學模型滯回曲線與實驗結果重合度較高,其中,滯回曲線面積S 與實驗相對誤差在10%以內,剛度K與實驗結果相對誤差在10%以內,同時,與三次多項式模型及傳統熱力學模型相比,經分數階修正后的力學模型具有滯回特性,說明此模型能有效反映空氣彈簧的力學特性,具有較高的精度,可滿足工程實際應用需求。
2、 基于ECAS的電動汽車建模與仿真
2.1 縱橫垂向耦合動力學模型
本文主要聚焦直線和轉向行駛時的車身姿態,須考慮車輛縱橫向運動與整車垂向力學模型的耦合,反映直線行駛急減速及轉向工況下,車輛的縱向、俯仰與側傾運動以及懸架動撓度、車輪轉動等運動響應。考慮車輛縱向速度及前輪轉角,將輪轂電機作為車輪的附加質量,建立電動汽車縱-橫-垂向耦合的14自由度整車ECAS動力學模型,如圖5所示。

圖5 電動汽車整車ECAS動力學模型
(1)車輛縱-橫向動力學方程
車輛縱向、側傾和橫擺運動微分方程為


式中:δ為前輪轉角;ax為縱加速度;vx、vy分別代表車輛縱向速度、側向速度;m 為整車質量;Fx、Fy 分別為輪胎縱向力與側向力;a、b 為質心至前后軸的距離;γ為橫擺角速度;Iz為整車繞z軸方向的轉動慣量;下標fl、fr、rl、rr 分別代表車輛左前輪、右前輪、左后輪和右后輪。
輪胎模型采用Dugoff 模型,輪胎受力如圖6 所示,縱、側向輪胎力為


圖6 Dugoff模型及其輪胎力
式中:σ 為滑移率;Cx、Cα 分別為輪胎縱向剛度、側向剛度;λ 與路面和輪胎間摩擦因數μ 有關;α 為側偏角;函數f(λ)為

各車輪垂直載荷:

同時,各車輪的縱向力與側向力均不能超出輪胎的附著橢圓方程:

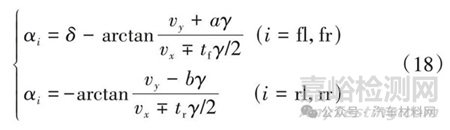
各車輪側偏角:
各車輪縱向速度:

車輪旋轉方程:

制動時滑移率:

式中:tf、tr 為前后軸輪距;l 為前后軸距離;Fz 為輪胎垂向力;h 為質心高度;v 為車輪縱向速度;Jw 為車輪轉動慣量;Tb、Td 分別為制動力矩與驅動力矩;ω 為車輪角速度;R為車輪半徑。
(2)車輛垂向動力學方程
由牛頓第二定理和車輛系統動力學原理,簧下質量運動可表示為

式中:mw 為車輪質量;md 為輪轂電機質量;x 為車身4 個懸架連接處的位移;xw 為簧下質量的位移;kt 為輪胎剛度;qt 為路面激勵;Cs 為減振器阻尼系數;Fas為空氣彈簧力。
車身垂向、俯仰和側傾運動表達式為
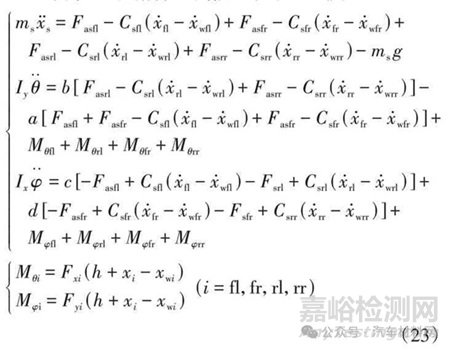
式中:ms為簧上質量;xs為簧上質量的位移;θ為俯仰角;φ 為側傾角;c、d 為1/2 輪距;Fx 為制動力矩不為零時地面對車輪的摩擦力;Mθ、Mφ 分別為俯仰力矩與側傾力矩。
2.2 仿真分析
為了分析所建立的整車ECAS 模型能否有效反映車輛在行駛過程中的車身姿態變化,選取直線急減速和雙移線轉向工況分別進行仿真,車輛參數如表3所示。
表3 車輛參數

(1)直線急減速工況
車輛勻速直線行駛,第7 s開始減速,車速由120減速到60 km/h,車輛縱向減速度a 分別為3、2.5、2 m/s2,仿真結果如圖7 所示,相同工況下分數階與未考慮分數階的ECAS 對車輛響應的影響,如表4所示。
表4 直線急減速工況分數階模型對車輛響應的影響對比


圖7 直線行駛急減速工況仿真
由圖7 可知,隨著縱向減速度的增大,車輪縱向力、俯仰角加速度和空氣彈簧垂向力都增加,車輛的平順性與穩定性隨之降低。在開始減速一瞬間,俯仰角加速度達到第1 個峰值,后逐漸穩定,這是因為急減速過程中制動力過大,導致車身俯仰角快速變化,在結束制動后俯仰角加速度出現了第2 個峰值,失去制動力后,由于空氣懸架的作用,車身趨于平穩。由表4 可知,在縱向減速度分別為3、2.5、2 m/s2時,相比于未考慮分數階,分數階模型的空氣彈簧力均方根值分別增加10.2%、9.0%、9.7%,俯仰角加速度均方根值降低8.1%、6.9%、6.9%,這是因為考慮了分數階后,空氣彈簧具有一定的阻尼特性,對減速時產生的俯仰具有一定的抑制。
(2)雙移線轉向工況
雙移線轉向行駛仿真,車速分別取60、75和90 km/h,第3 s 開始轉向,轉向過程約8 s,仿真結果如圖8 所示。相同工況下考慮分數階與未考慮分數階的ECAS對車輛響應的影響對比如表5所示。
表5 雙移線轉向工況分數階模型對車輛響應的對比


圖8 轉向行駛雙移線工況仿真
由圖8 可知,在雙移線的過程中隨著車速的增加,車側向力、側傾角加速度和空氣彈簧力均增大,車輛的平順性與穩定性降低。在開始變道時,側傾角加速度達到第1 個峰值,這是由于車身側向速度增加引起的,變更回原車道后,車身逐漸平穩。由表5 可知,在車速分別取60、75、90 km/h 時,考慮分數階后,空氣彈簧力均方根值增加6.7%、6.2%、9.7%,側傾角加速度降低1.4%、5.5%、6.4%,與直線減速行駛工況的仿真結果一致。
綜上可見,隨著減速度與車速的增加,車輛的平順性與穩定性降低。基于第1 節建立分數階空氣彈簧模型,通過縱-橫-垂向整車ECAS 動力學模型分析,可以很好地反映車輛在直線行駛時不同減速度與不同速度轉向行駛過程中的車身姿態及空氣彈簧垂向力的變化,進一步驗證了所建立的空氣彈簧模型的有效性。在此基礎上,可對其進行控制策略的設計與驗證。
3、 模型預測(MPC)控制器設計及實驗驗證
模型預測控制(MPC)的控制動作是在每一采樣瞬間通過求解有限時域開環的最優控制問題而獲得,其控制流程如圖9所示。

圖9 模型預測控制器流程圖
3.1 模型預測(MPC)控制器設計
為便于MPC 控制器的求解,對整車ECAS 模型進行線性離散化處理,處理后的狀態空間方程可寫為

其中:

式中A、B、C、D為狀態矩陣。
預測模型的功能是根據被控對象的歷史信息[u(k-j),y(k-j)],預測其未來輸入u(k + j)與未來輸出y(k + j)(k為當前時刻,j ≥1),具體輸入輸出參數如表6所示。
表6 MPC輸入輸出參數

滾動優化是在每個時間段內的尋求最優,優化的性能指標在內容上也是實時變化的,預測控制的優化過程是反復在線進行的,即滾動優化。優化性能指標為

式中qi 和rj 分別為輸出加權矩陣和受控輸入加權矩陣,可根據期望設定相應權重系數。
在預測模型的基礎上考慮被控對象的約束條件并對其進行處理是預測控制的一個主要特征,綜合考慮車輛懸架系統的性能要求以及實際行駛情況,需要對滾動優化設定約束條件,即同時限定懸架動撓度不可超出限制(乘用車一般為7~9 cm),輪胎動載荷不能超出車身重力,且車輛滑移率與側偏角均在合理區間,縱、側向輪胎力滿足式(17)的附著橢圓約束。
被控對象t時刻接收到預測控制器控制信號,被控系統t+1 時刻的實際輸出y(t+1)與預測模型預測輸出 不相等,構成預測誤差:
不相等,構成預測誤差:

式中 為預測系統輸出;h為誤差校正矢量。
為預測系統輸出;h為誤差校正矢量。
3.2 模型預測(MPC)控制器仿真分析
在Simulink 中搭建ECAS 整車模型及MPC 控制器,假設制動力矩恒定,將俯仰力矩作為狀態空間外部輸入。仿真工況為:車輛以120 km/h 速度勻速直線行駛,在第7 s 開始減速,減速過程持續6.4 s,車速減到60 km/h,得到兩種工況下不同控制器對ECAS 整車模型時域響應的影響,如圖10 所示。對比MPC 控制與PID 控制下的ECAS 與被動空氣懸架的前懸架動撓度、后懸架動撓度與俯仰角加速度的均方根值和極值,如表7所示。
表7 急減速工況下分數階模型對車輛響應的影響比較

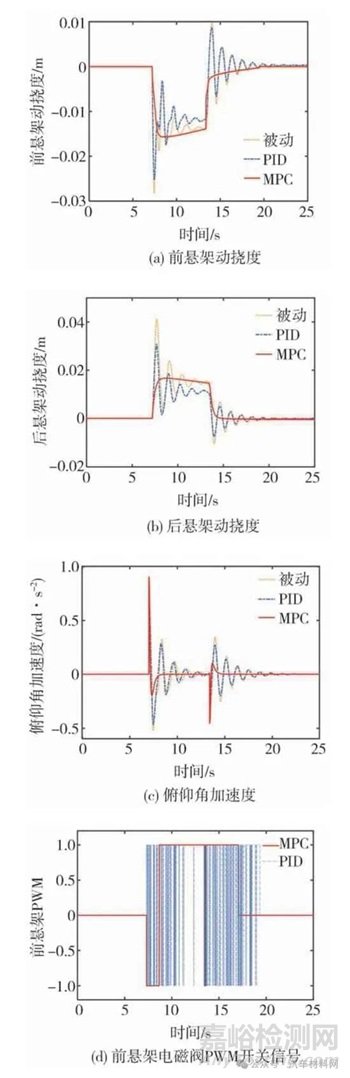
圖10 急減速工況下的車輛響應
由圖10 和表7 可知,在對ECAS 施加MPC 控制后,前懸架動撓度、后懸架動撓度與俯仰角加速度的極值相比于被動懸架分別下降了18%、54% 和-0.02%,相比于PID 分別降低8%、42%和-0.06%,均方根值相比于被動懸架分別下降了9%、6%和48%,相比于PID分別降低7%、27%和39%,同時,相較于未考慮分數階修正的ECAS,考慮分數階修正的被動懸架、PID 控制、MPC 控制的車輛前懸架動撓度均方根值增大1.3%、1.5%、1.4%,俯仰角加速度減小11.2%、11.3%、25.1%。說明MPC 控制器可有效減小懸架動撓度,改善車身姿態,提高舒適性。由于制動力矩為階躍信號,MPC 控制器針對俯仰角加速度極值的優化并不明顯。
為進一步驗證MPC 控制器的有效性,進行雙移線工況的仿真分析:車速為60 km/h,仿真時長15 s,在第3 s 進行雙移線轉向,8 s 后換回原車道,得到兩種工況下不同控制器對ECAS 時域響應的影響,如圖11 所示。MPC 控制、PID 控制與被動空氣懸架的前懸架動撓度、后懸架動撓度與俯仰角加速度的均方根值和極值,如表8所示。
表8 雙移線工況下分數階模型對車輛響應的影響比較
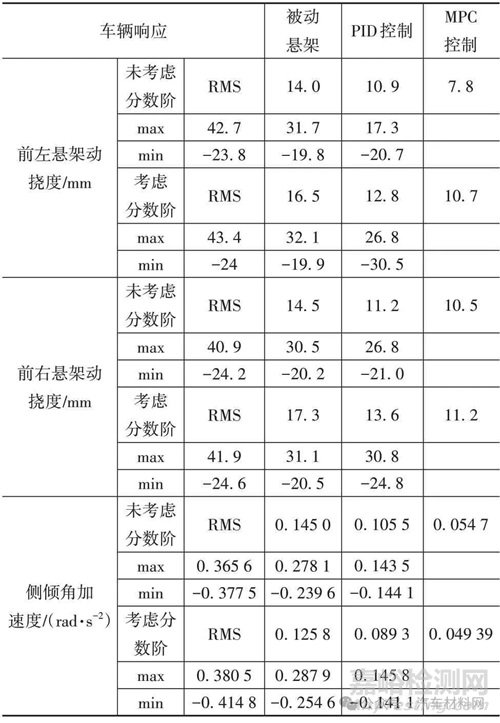

圖11 雙移線工況下的車輛響應
由圖11 和表8 可知,施加MPC 控制的前左懸架動撓度、前右懸架動撓度與側傾角加速度的極值相比于被動懸架分別下降了38%、27%和66%,相比于PID分別降低17%、1%和45%,均方根值相比于被動懸架分別下降了24%、23%和61%,相比于PID 分別降低2%、0%和45%,相較于未考慮分數階修正的ECAS,考慮分數階修正的被動懸架、PID 控制、MPC控制的車輛前左懸架動撓度增大17.9%、17.4%、37.2%,側傾角加速度減小13.7%、15.4%、9.8%。PID 控制在急減速與雙移線中車輛的響應指標除急減速時前、后懸架動撓度均方根略優于MPC 控制外,其余指標均劣于MPC 控制,并且由圖10(d)和圖11(d)可看出MPC 控制下的電磁閥開關次數明顯低于PID 控制。由此可見,對ECAS 施加MPC 控制后,有效降低了車輛在進行急減速與雙移線時的懸架動撓度、俯仰角加速度和側傾角加速度,并且優化效果優于PID 控制,可以使車輛更平穩,保證乘坐舒適性。
3.3 實驗驗證
3.3.1 實驗系統及控制流程
ECAS 實驗臺由空氣彈簧與CDC 減振器組成,主要包括上位機及測控系統、配電控制柜、ECAS 懸架實驗臺,如圖12所示。

圖12 ECAS實驗臺系統組成
1—MPC5744P 車載控制器;2—裝有Labview 的PC 機;3—電流功率放大器;4—PLC 控制器;5—電動缸伺服驅動系統;6—負載壓縮機;7—伺服電動缸;8—空氣彈簧;9—車身高度傳感器;10—電磁閥;11—壓力傳感器;12—加速度傳感器。
本實驗臺架省去簧下質量部分,從PC 機導出簧下質量位移xw 作為外部激勵,由伺服電動缸實現作動,控制流程圖如圖13 所示,通過加速度傳感器采集ECAS 實驗臺簧上質量加速度信號和車身位移信號,發送至MPC5744P 控制器,進行信號轉換以及積分運算,經過濾波后作為控制器輸入。ECAS控制器計算出理想質量流量,通過PWM 處理后作為的控制信號。在Labview搭建上位機,可采集實驗中被動與施加控制效果時的傳感器信號,并對采集的信號進行示波顯示及保存。

圖13 整車實驗臺控制流程
3.3.2 實驗結果分析
由Simulink 導出被動懸架的動撓度,采樣間隔0.07 s,急減速工況及雙移線工況的采樣時間分別為7和12 s,每次實驗時保持空氣彈簧高度在同一固定值,且CDC 減振器不通電,以便實現基于空氣彈簧的控制效果的驗證。采集懸架動撓度,并計算控制前與控制后的極值進行對比分析,以驗證控制算法對ECAS的控制效果。
由圖14和表9可以看出在急減速及雙移線工況下,施加控制后的懸架動撓度有了一定改善,其中,急減速工況中控制后的懸架動撓度極大值下降了1 mm,均方根值下降了2%,雙移線工況中控制后的懸架動撓度極小值下降了1 mm,均方根值下降了3.5%。證明本文所提出的MPC 控制在整車ECAS控制中的有效性,可改善車輛在行駛時的平順性和舒適性。
表9 整車ECAS實驗車輛響應
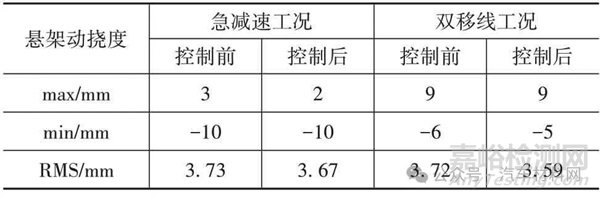

圖14 懸架動撓度實驗曲線
4、 結論
基于熱力學理論和分數階建立了空氣彈簧力學特性模型,通過實驗驗證了模型的準確性。在此基礎上,考慮車輛縱橫向動力學特性與Dugoff 輪胎模型,建立了整車ECAS 動力學模型,針對直線與轉向行駛工況,設計了整車模型預測(MPC)控制器,并進行了仿真分析和整車ECAS 實驗驗證,研究結果表明:
(1)建立的分數階空氣彈簧熱力學模型,可以很好地表達空氣彈簧的力學特性,修正了空氣彈簧的黏彈性阻尼特性,實驗證明該模型可以較精確描述空氣彈簧的力學特性。基于所提出的分數階空氣彈簧模型,通過整車ECAS 縱-橫-垂向動力學模型分析,可以很好地反映車輛在行駛過程中的車身姿態變化,進一步表明所建立的空氣彈簧模型的可行性。
(2)以降低車身俯仰角加速度與側傾角加速度為控制目標,設計提出了一種基于整車ECAS 的MPC 控制器,與PID 控制和被動空氣懸架控制相比,可有效改善車輛懸架動撓度、俯仰角加速度和側傾角加速度。其中,急減速工況下,前懸架動撓度、后懸架動撓度與俯仰角加速度的極值相比于被動懸架分別下降了18%、54%和-0.02%,均方根值相比于被動懸架分別下降了9%、6%和48%,雙移線工況下,前左懸架動撓度、前右懸架動撓度與側傾角加速度的極值相比于被動懸架分別下降了38%、27%和66%,均方根值相比于被動懸架分別下降了24%、23%和61%。
(3)整車臺架實驗表明,采用MPC 控制器控制的ECAS 在車輛響應方面相較于未施加控制的空氣懸架有一定優化作用,證明了所設計的控制策略應用于ECAS的有效性。
來源:《汽車工程》作者:馮桂珍1,2,趙東鵬2,李韶華1
(1.石家莊鐵道大學,省部共建交通工程結構力學行為與系統安全國家重點實驗室,石家莊 050043;2.石家莊鐵道大學機械工程學院,石家莊 050043)

來源:Internet


