前言導讀
心腦血管疾病具有高發病率、致殘率、復發率特點,血管腔內介入治療具有關鍵作用。但心腦血管解剖結構比外周血管更為復雜,手術難度更大,因此介入手術時間較長,手術醫師承受的壓力與職業健康損害隨之升高。此外,介入手術對精確度、安全度有較高要求,手術醫師培養周期較長,與巨大且快速增加的醫療需求不呈正比,間接提升了從事心腦血管疾病介入治療的門檻,不利于心腦血管疾病介入治療的發展和完善。為解決傳統介入手術的不足,介入機器人輔助治療技術應運而生,手術醫師應用機器人輔助開展介入手術,在手術室外即可對導絲和導管進行操縱,不僅可有效減少手術醫師在X線輻射中暴露,還降低工作強度,提高手術精確度。
介入機器人行業解讀
介入放射學作為一門相對較新的具有微創性質的專業,正在迅速發展。盡管機器人系統在這一領域的應用顯示出巨大的前景,如提高精度、準確性和安全性,以及降低輻射劑量和遠程操作程序的潛力,但這些技術的進展一直很緩慢。
介入放射學(IR)是最具創新性和創造性的學科之一,在成像技術、導管和設備以及治療程序方面有著快速的發展。盡管如此,在機器人方面,IR一直落后于其他專業。達芬奇機器人于1997年在比利時首次用于腹腔鏡膽囊切除術,自1999年以來已被廣泛使用,尤其是在外科、泌尿外科和眼科。自2000年以來,整形外科醫生一直在使用機器人輔助的假體植入。介入血管造影機器人最初被發明用于心臟介入,隨后過渡到外周介入領域。
在IR領域,介入機器人系統旨在提高手術的準確性和安全性,患者的治療成功率性和舒適性,同時最小化操作人員的技能可變性,減少患者和臨床醫生的輻射暴露。此外,鑒于這些系統的遠程操作性質,醫療水平不高地區的患者可以從這些技術中獲得好處。機器人技術在非血管IR手術中的應用提高了經皮手術精度,同時增強了對預定義目標路徑的依從性。
據弗若斯特沙利文數據,2020年全球手術機器人市場規模達83.2億美元,其中腔鏡機器人和骨科機器人的技術與市場已較為成熟,分別占據52.5億美元和13.9億美元的市場規模。相比之下,血管介入機器人則屬于新興領域,比如美國血管介入領域的機器人手術滲透率也僅為0.5%左右。雖剛剛開始,但基于龐大的市場需求,我國血管介入手術機器人的市場規模將從2022年的0.34億元增長至2030的58.24億元,復合年增長率為90.3%。
血管介入機器人臨床優勢
血管介入手術,是指在DSA等影像設備的引導下,利用穿刺針、導絲、導管等器械經血管進行診斷與治療的技術。該手術有創傷小、恢復快、精準治療的特點,在部分領域已經取代外科手術成為首選治療方式。
傳統介血管介入手術,存在幾個明顯問題:
1)醫護人員需要長期暴露在X射線下,必須身著重達10多公斤的鉛衣,被譽為 “鉛衣戰神”,但依然受到大量輻射傷害;
2)血管介入手術要求高,操作難度大,學習曲線長,約5-10年出師;
3)手術量大,僅經皮冠狀動脈介入治療,即PCI手術量,在2020年已達到140萬臺,年增長10-15%,醫護疲勞,增加手術風險;
4)疑難血管病例手術時間長,并發癥易發。
針對以上痛點,血管介入機器人應運而生。
大多數血管機器人,通常由推進裝置系統、操作,裝置、定位機械臂等三部分組成。醫生通過操作臺上的搖桿或是操作按鈕,控制推進裝置,實現對手術室內定位機械臂上導管導絲前進、后退、旋進、方向變化、快慢等控制,從而完成球囊擴張、支架釋放等手術流程。
血管介入機器人構成與原理(來自西門子官網)
血管介入手術機器人的出現,讓介入醫生實現隔室操作,擺脫鉛衣負擔,具有以下優勢:
1)射線防護。實驗證明介入機器人可減少醫生90%輻射,減少患者20%輻射;
2)精準操作,手術效率高,減少并發癥。利用圖像導航和操作端的輔助操作,精準定位病變,優化器械輸送路徑,縮短手術時間,減少手術并發癥;
3)醫患隔離,較少交叉感染。機器人可以遠程完成手術,減少傳染性疾病的傳播;
4)手術標準化,學習周期短,解決介入醫生匱乏的現狀;
5)遠程手術可實現優質醫療資源下沉,解決醫療資源不均衡問題。
技術的最新進展使機器人輔助血管內和非血管介入手術的得到改進。IR中的機器人系統可以解決該領域很多的缺點,即患者和醫護人員都暴露在電離輻射中(圖A)。此外,在IR中使用機器人系統的其他潛在好處包括提高治療精度,減少操作時間,以及減少達到目標所需的重新調整次數。
最終,隨著遠程控制機器人系統的進一步進步,機器人輔助IR可能會改善醫療服務,尤其是在醫療欠發達地區。與手術模擬器相結合,機器人系統可以作為未來的潛在介入手術培訓工具,在最大限度地減少輻射暴露的情況下,實現高度真實的訓練場景。類似地,機器人系統的使用可能會在未來的介入治療中最大限度地減少介入醫生操作的可變性。然而,仍有許多缺點需要解決,以使該技術在IR領域得到廣泛采用。其中一些限制包括這些機器人的高成本、無法將一些機器人系統與其他手術設備和/或器械集成、對IR套件中的工作流程的干擾以及缺乏觸覺反饋。人工智能在機器人手術中的應用在改善手術參數方面顯示出了一定的前景,如改善觸覺反饋系統和手術指導,以及更好地預測手術時間和術后結果。
醫療器械產品解析
1、Sensei Magellan H
Hansen Medical Inc
Hansen Medical成立于2002年9月,總部位于美國加州,是一家醫療用導管機器人科技公司,2005年,Hansen收購從麻省理工學院的人工智能實驗室和波士頓大學醫學中心手術科獨立出來的醫療機器人公司——EndoVia Medical Inc.公司制造了機器人手術系統和手術過程所使用的導絲、導管、護套、氣球、支架等工具,產品包括可進行心血管手術的Sensei機器人導管系統、進行周圍血管手術的Magellan機器人系統、Artisan操控導管等。
Sensei
與“達芬奇”不同的是,重點產品Sensei機器人手術系統專注于更細致的一些領域,例如從手臂或大腿的大血管切開小口,用導管導入手術工具,來做血液循環方面的手術等。
Sensei (Hansen Medical, Mountain View, CA, USA)是首批商用機器人系統之一,于2007年獲得美國食品和藥物管理局(FDA)批準,用于心臟測繪和消融手術。該系統使機器人能夠使用3自由度(DOF)操縱桿遠程控制可操縱導尿管。與手工操作相比,Sensei提供了更好的導管穩定性,并成功地用于心臟消融和血管內動脈瘤修復。Hansen Medical的下一代機器人平臺是Magellan機器人系統,該系統在2012年獲得了FDA 510(k)許可,允許介入放射科醫生遠程控制6Fr、9Fr和10Fr機器人導管的遠端同軸尖端的形狀和運動,以及機器人操作標準的現成導絲。機器人能夠控制0.03500和0.01800線的運動,操作者可以通過機器人控制站上的按鈕進行線的前進、收縮、360度旋轉和停放。這一開創性的機器人系統已經在一些外周動脈介入治療中顯示出其有效性和安全性,如主動脈支架移植、開窗血管內動脈瘤修復(FEVAR)和栓塞技術。
SENSEI是歐洲醫院系統首個商用的機器人伽瑪探針,用于術中檢測前哨淋巴結以及通過淋巴系統的癌癥轉移。這項技術有望實現更精確、更具針對性的癌癥手術,適用于肺癌、結直腸癌、胃癌、婦科和前列腺癌等多種主要癌癥類型。
SENSEI®是一種先進的導航系統,微型探頭具有很強的靈活性,擴大了視野,能夠快速定位放射性熱點。適用于微創和機器人輔助癌癥手術。
SENSEI®優勢:
1.長度縮小到40毫米以上:一次性探頭尺寸僅超過40mm,是腔內手動和機器人腹腔鏡手術的理想選擇。連接在一根3米的輕型電纜上,探針可以通過一個標準的12毫米入口輕松取出。
2.易于使用:與頂尖外科醫生和核醫學醫師緊密合作設計。該系統易于在手術室使用,具有清晰的聲音和圖形顯示。SENSEI®可與外科機器人平臺上的外部顯示器集成。
3.一次性探頭:SENSEI®探頭是一次性的,不需要無菌護套,也不需要在兩個手術之間進行再處理,消除了交叉污染的風險和因丟失或損壞而產生的成本。
4.腔內靈巧:當與一個鉸接抓取器一起使用時,這種微型探針允許無與倫比的腔內操作性和靈活性。
5.完全旋轉:通過多夾點定位,探頭可以在手術區域內提供六個自由度,到達所有感興趣的區域。
Magellan H
2012年,Hansen Medical推出了手術機器人Magellan
Magellan系統由控制臺、床邊控制面板、遠程導絲控制器、遠程導管控制器4部分組成,通過對傳統導管結構進行改造,其可更精確地控制導管尖端移動,在腦血管病介入手術過程中經顱多普勒記錄的血管壁撞擊次數顯著降低,減少了對血管內皮的損傷。
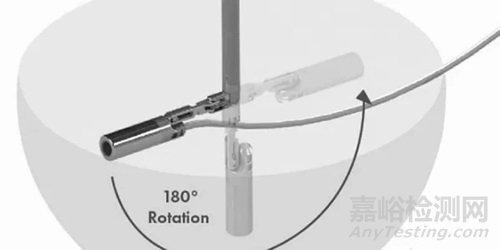
Magellan使用了Hansen自研的蛇形可扭轉頭部導管,絲繩機構可以讓導管頭部達到180度的彎曲(9Fr產品),這種大膽的設計即使在今天也是讓人驚奇的。一般介入器械在彎曲的血管內會因為柔性,按照血管的形狀依附在血管壁上,但是在脆弱的血管中,這種被動的彎曲和持續的摩擦可能會導致血管壁的撕裂。而Magellan的導管可以主動扭轉,避免跟血管壁的大量接觸,并且彎曲后的導管可以給導絲提供優異的支撐。
一般來說,手術機器人的研發要么是對準了一個臨床剛需,或者在用戶使用中逐漸發現了更好的臨床需求(比如達芬奇)。遺憾的是,Magellan系統似乎沒有什么好運,它主要的應用場景,是在外周血管,如腹主動脈、主動脈、頸動脈修復過程中,為導絲提供更快的介入和支撐。2016年Hansen被Auris Medical收購以后,因為市場定位及需求的問題,Magellan就逐漸消失了。
2、CorPath GRX
Corindus
Corindus是西門子旗下子公司,也是機器人輔助血管介入的全球技術領導者。其產品的CorPath是一種血管介入機器人,可為經皮冠狀動脈和血管手術帶來機器人精度。其致力于開發創新的機器人解決方案,通過為世界各地的患者提供專業及時的醫療護理,徹底改變緊急情況的治療。
CorPath GRX是首款經FDA批準并經CE認證的經皮冠狀動脈和血管手術手術機器人。CorPath GRX在神經介入領域應用也獲得CE批準。
CorPath GRX系統主要應用于心血管及外周血管的介入治療,經過設備升級與改造后逐漸推廣用于治療解剖結構更加迂曲、狹窄的腦血管疾病。該系統由線性運動操作系統和旋轉運動操作系統組成,可在術中精準控制導絲、導管及球囊與支架輸送,并實現30°旋轉,以便操作時更準確地控制導管(操作精度可達1mm),將導絲和導管保持在血管腔中心,減少對血管壁的損傷。
CorPath GRX主要由兩大部分構成:床旁操作單元和手術控制單元。
床旁操作單元:
床旁操作單元為模塊化設計,由安裝在手術床護欄上的可靈活移動的機械臂和一次性操控盒組成。操作盒與機械臂末端的驅動連接口相連,盒內的動力裝置分別操控指引導管、指引導絲,球囊或支架,接收指令完成推送、牽拉和旋轉動作,細微動作可以精確到1mm。
1.機械臂, 2. 驅動接口,3.指引導絲,4.球囊或支架(尾端接壓力泵接口),5.推送裝置,6.旋轉裝置,7. Y型閥側孔(監測壓力和注射造影劑),8. Y型閥,9. Y型閥旋轉器,10.指引導管推送器,11. 指引導管夾持器,12.指引導管,13一次性操控盒
手術控制單元
CorPath GRX的手術控制單元為移動工作站式的鉛防護工作艙,不僅可以將手術控制單元放置在手術區域的任何地方或DSA控制間,而且還可以使介入醫生不需要穿著鉛衣,坐在射線屏蔽良好的工作艙內遙控完成手術。手術控制單元采用觸摸屏控制臺和兩個操縱桿對手術器械和DSA設備進行操控,控制艙內配有壓力泵接口和造影劑注射系統,另外,工作艙內監視器可以實時查看手術錄像、心電監護、血流動力學參數。
3、R-One
Robocath
Robocath是一家法國公司,于2009年由Philippe Bencteux博士成立,負責設計、開發血管介入手術機器人。
2023年5月17日—Robocath是一家設計、開發和商業化治療心血管疾病的智能機器人解決方案的公司,宣布推出其最新的機器人平臺—R-One+。
obocath開發機器人解決方案,集成了獨特的仿生技術,優化了機器人輔助冠狀動脈成形術的安全性。這種醫療程序包括通過將一個或多個植入物(支架)插入供血的動脈來使心肌血管重建。Robocath的機器人解決方案旨在精確操作并執行準確的運動,創造更好的干預條件。由于其開放的架構,它們都與市場領先的設備和cathlabs兼容。
R-One+™由兩個核心元素組成:
-指揮單元,可以定位在cathlab(與移動輻射防護屏幕相結合)或控制室中
-機器人單元:包括機器人及其鉸接支撐臂。
2023年12月,上海微創醫療機器人和法國Robocath S.A.S聯合在華成立的合資公司知脈(上海)機器人有限公司旗下R-ONE®血管介入手術機器人正式獲得國家藥品監督管理局(NMPA)上市批準。這是首個在國內完成多中心臨床試驗并獲批的商業化冠脈血管介入手術機器人,填補了我國PCI手術機器人領域的空白。
4、Niobe ES
Stereotaxis
Stereotaxis成立于1990年,是電生理創新機器人技術的全球領導者,致力于為介入導管室提供可應用于電生理等介入手術的機器人系統及配套解決方案,幫助醫生為患者提供更高精確度和安全性的手術治療,并提高導管室手術效率以及加強手術信息的整合。Stereotaxis于2003年推出了全球首個磁導航電生理機器人Niobe,升級版Genesis RMN系統于2020年獲得了美國FDA上市批準。
Niobe ES是一種商用磁力驅動機器人平臺,可在3個自由維度內實現磁場導航和重新定位磁性導管。磁性導管由柔軟材料制成,以避免過度的接觸力,并降低心臟穿孔的風險。Niobe的主要缺點與它獨特的導管相關、大約30分鐘的相對較長的設置時間以及放置設備需要較大的空間有關。
Niobe ES由手術臺旁邊的兩個機器人控制的磁體組成。在手術過程中,醫生使用直觀的計算機界面來調整患者周圍的磁場。允許醫生精確地引導和操縱在其尖端嵌入有磁體的導管。從而可以幫助醫生在進行心臟手術時更加精準地操縱導管,該系統具有更快的導管操作速度和更高的精度,可以顯著提高手術的效率和安全性。
2020年,Stereotaxis推出了Genesis,這是Niobe系統的更新版本,它采用了一種新穎的設計,減少了機器人的尺寸、重量,并實現了更快、更靈活的磁力運動。
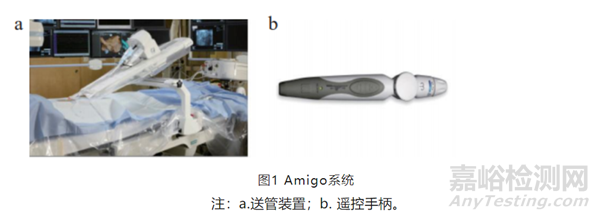
5、Amigo
Catheter Precision
Catheter Precision, Inc.(前身Ra Medical Systems, Inc.)于2018年7月在特拉華州注冊成立,之前于2002年9月4日在加利福尼亞州注冊成立。該公司是一家商業級醫療設備公司,利用他們先進的準分子激光平臺,用于治療血管和皮膚病。
Amigo用于血管介入電生理治療的遠程導管系統。Amigo系統由一個安裝在電生理臺上的送管裝置和一個有線控制器組成 。Amigo不需要單獨的工作站,可以與現有的透視技術結合確定導管位置并通過控制器操作導管。Amigo是一個開放式平臺,能夠兼容現有的商用導管,降低了使用成本。導管被放置在擴展底座內,介入醫生可以通過控制器在30m外進行控制。控制器可以實現導管插入、回撤和旋轉以及導管頂端偏轉。通過控制器的前進、后退按鈕可以控制滑軌的前進和后退,從而實現導管的插入與回撤,導管運動速度為每秒13mm,最小控制精度為1.6mm。介入醫生旋轉控制器的最前端旋鈕實現轉臺的旋轉,帶動導管進行 360° 旋轉。旋轉控制器中間的旋鈕可以實現導管的遠端彎曲
Amigo遠程導管系統的設計目的是為心臟電生理手術中的遠程導管操作提供一種簡單且成本較低的解決方案。Amigo得益于作為控制面板的手持遠程設備以及與現成消融導管的兼容性。由于該系統是專門為心臟電生理治療而設計的,因此在PCI或PVI中的潛在臨床應用有限。
6、AcuBot
Hopkins/Georgetown, USA
最早兼容ct的機器人系統之一是AcuBot (美國喬治敦約翰斯·霍普金斯大學URobotics實驗室)。fda批準的AcuBot建立在之前的PAKY-RCM機器人系統的基礎上,并通過添加幾個新組件進行了改進,包括被動s臂和XYZ笛卡爾工作臺。該機器人具有6自由度,設計用于解耦定位、定向和儀器插入。
該機器人系統已在一項神經和關節突塊的尸體研究中進行了測試,平均放置精度為1.44±0.66 mm(平均值±SD)。AcuBot系統與預定目標的平均平移偏移量為1.2 mm(范圍0.39-2.82 mm),導航系統為5.8 mm(范圍1.8-11.9 mm)。AcuBot達到目標的平均時間為37秒(15-75秒),而導航系統為108秒(45-315秒)。
Acubot于2005年通過FDA認證,同年一項20例神經阻滯術隨機對照試驗表明,機器人和傳統徒手法的平均偏差分別為1.105 mm和1.238 mm。雖然Acubot機器人最終并未能成功進入商業化,其公司也未繼續將其應用于脊柱外科領域的研究,但其作為首個基于主動導航系統的脊柱外科機器人,為后續脊柱外科機器人的研發帶來了新的思路。
7、B-RobⅡ
Seibersdorf Research
奧地利塞伯斯多夫研究中心擁有8個實驗室,這些實驗室支持并實施能夠滿足成員國在一系列主題領域的發展需要的活動,開展應用研究和開發,向成員國提供培訓和能力建設,并提供技術和分析服務。
B-Rob II機器人系統(奧地利研究小組ARC,奧地利塞伯斯多夫研究中心)是B-Rob I的繼任者,具有7個自由維度,設計用于CT和超聲(US)引導的活檢采樣。
第二代機器人的設計目標是創建一個靈活的設置設計,更適合臨床實踐,更容易與其他系統集成,同時降低技術復雜性和成本。使用明膠假體評估B-Rob II系統機器人針頭放置的準確性,并進行了21次活檢。平均置針精度為1.8±1.1 mm (mean±SD),平均手術時間為2 min。這個機器人系統被用于協助胎兒和嬰兒的死后ct引導活檢;然而,它提供的附加診斷價值有限。活檢取樣失敗主要涉及CT軟組織對比降低的器官,如脾臟,并且在腹部低脂肪和皮下脂肪的胎兒中評估這些器官通常是困難的。
8、Micromate
Interventional Systems
Interventional Systems(iSYS)公司總部位于奧地利的基茨比厄爾,公司致力于提供具有成本效益、更易負擔、可擴展和多模式的機器人平臺,以執行圖像引導的外科手術,而不會影響患者安全和手術準確性。
Interventional Systems其機器人---Micromate全球已上市最小手術機器人。盡管Micromate非常小,但是其具備影像介入完成各類手術能力。
小巧使得Micromate成為唯一一個能隨著影像設備運動而運動,并且實現實時監測 。它使復雜的手術變得簡單可靠,整體手術時間縮短66%,同時患者輻射減少了84%,而且實現醫生零輻射。
Micromate與其配合影像設備包括CT、B超、DSA等等。
9、Zerobot
Okayama University(日本岡山大學)
Zerobot(岡山大學設計;由Medicalnet Okayama制造的)是另一種遠程控制機器人,專為需要穿刺的ct引導手術設計,如消融、活檢和引流。Zerobot有一個操作界面,可以操縱機器人6自由度。機器人在幻影和動物實驗中獲得了準確、安全的結果。
從2020年6月開始,進行使用岡山大學開發的醫療用針穿刺機器人(Zerobot®)由醫生主導的臨床試驗。在臨床試驗中,進行了術者和機器人的穿刺精度的比較,及使用機器人對癌癥的治療(消融)。使用這種穿刺機器人的臨床試驗在國內尚屬首次。
Zerobot的開發是從2012年開始岡山大學通過醫工合作進行的。2018年首次臨床試驗作為特定臨床研究實施,10例全例機器人成功用針穿刺。
10、ROBIO EX
Perfint Healthcare
Perfint Healthcare是一家醫療設備公司,專注于在介入腫瘤領域開發智能解決方案。Perfint的旗艦產品PIGA CT是一種高科技醫療機器人定位設備,可幫助肺部、腹部和骨盆小腫瘤的活檢、FNAC、藥物輸送、消融等臨床應用。
印度Perfint 公司的ROBIO EX系統是CT和PET-CT引導的機器人定位系統,可以用于胸部腹部的介入治療,幫助快速準確地靶向腫瘤和放置工具,具體應用包括組織活檢,細針穿刺細胞學檢查(FNAC),疼痛管理,引流和腫瘤消融。
ROBIO EX的機械臂具有5個自由度以及亞毫米和亞角度的精度。其中兩個線性運動用于定位導向器,兩個角度運動用于將針頭修改為適當的角度入口,這確保了手術可以在不同的高度和位置進行。它還包括一個屏氣管理系統,以保護可能因呼吸而移動的目標。Robino EX的一個主要缺點是,它固定在地板上的支架上,因此,每次移動CT臺時,針頭都必須分離。
ROBIO EX系統目前可支持手術類型:
1.活檢/細針吸取細胞學檢查(FANC):醫生可通過CT掃描資料來計劃穿刺路徑,ROBIO導引系統可根據計劃做出軌跡并輔助穿刺針的置放。
2.微創局部治療:ROBIO EX系統可用于幾種常用的消融手術的引導,如射頻消融、冷凍消融等,ROBIO EX系統可根據計劃軌跡對單探針消融術進行軌跡計劃和輔助探針置放。
3.引流:ROBIO EX系統可引導抽吸針及引流管置于計劃靶點位置;
4.疼痛治療:ROBIO疼痛管理模塊輔助進行計劃,可放置多達2個針,以引導藥物注射,阻滯疼痛神經傳導。
此外,ROBIO EX還可用于碘125粒子植入、黃金基準標記物置放等其他使用單個和直形針或探針的介入手術,協助臨床醫生對腫瘤進行靶向定位,對診斷或治療工具的精準置放進行計劃。
11、Innomotion
Innomedic, RheinsheimPhilippsburg
Innomotion是一款氣動機器人,完全與磁共振兼容,可在磁共振內部提供精確的穿刺。該機器人有6個自由度,可以固定在核磁系統上。該裝置經過優化,可用于狹小的磁共振和CT環境。最初的系統較為簡單,僅可提供位置引導,即機器人向醫生指示穿刺位點和針取向,不能進行實時引導和進針。后續系統進行了升級,增加自由度到7個,并改善了驅動方式。
MRI已逐漸成為介入手術中普遍選擇的成像方式,主要是因為其出色的軟組織對比度分辨率,缺乏電離輻射,以及多模態感知如血流、運動、變形、應變和溫度的能力。然而,它有主要的缺點,包括成本,有限的孔空間,以及對兼容儀器的限制。Innomotion能同時兼容CT和MRI。第二代INNOMOTION機械臂有6個自由度,還有一個額外的被動旋轉自由度用于預定位,其主要目標是在磁體內精確定位儀器。
12、EPIONE
Quantum Surgical
Quantum Surgical 成立于2017年,是由持續創業者、Medtech SA的創始人 Bertin Nahum 創立的手術機器人初創公司。該公司致力于開發適用于廣泛醫療條件的端到端微創治療解決方案,使醫生能夠更好地進行評估、規劃和治療。
Epione®是一種開放式的機器人穿刺手術導航定位解決方案,可兼容消融、活檢、粒子植入等多種治療方式。
該產品由智能機械臂手術臺機、中央控制臺、導航定位儀和手術工具組成,通過病灶智能識別、穿刺路徑規劃、機械臂輔助穿刺,協助術者在CT影像的引導下為硬直器械的穿刺路徑進行規劃,并根據規劃提供穩定、精準、可重復的進針路徑和位置引導,從而減少術中穿刺針調整次數,降低患者輻射劑量,減少并發癥的發生率,避免“盲穿”面臨的高難度、高風險等一系列問題,顯著提高手術效率。
Epione是唯一一款為靶向腹部腫瘤消融時提供 6 個自由度和前所未有的靈巧性的介入腫瘤學機器人。
尤其對于腫瘤消融這一最為重要的應用,Epione®還能夠為不同的消融技術(射頻、微波、冷凍消融、不可逆電穿孔)提供直觀、可視的消融效果術前預測和精準的消融范圍術后確認,方便醫生為患者制定最為合適且有效的治療方案。
Epione®已分別于2021年和2022年獲得歐盟CE認證和美國FDA上市批準
專利事務值得關注
隨著手術機器人技術領域的競爭日益加劇,專利事務已經成為企業不可或缺的一部分。做好自身的專利布局,不僅可以保護企業的創新成果,還可以為企業在市場競爭中提供有力的法律支持。
首先,企業需要注重專利的申請和保護。在研發過程中,一旦有新的技術突破或創新點,就應及時申請專利,確保自身的技術成果得到法律保護。同時,企業還需要對已有的專利進行定期維護和管理,確保其有效性和穩定性。
其次,企業需要建立完善的專利預警機制。通過定期檢索和分析相關領域的專利信息,企業可以及時了解技術發展趨勢和競爭對手的動態,從而避免可能的專利侵權風險。一旦發現存在侵權風險,企業應迅速采取措施進行應對,如尋求專利許可、進行技術改進或調整市場策略等。
此外,企業還需要做好應對專利戰的準備。在競爭激烈的市場環境中,專利戰可能隨時爆發。因此,企業需要提前制定應對策略,如建立專門的法務團隊、儲備充足的資金用于可能的專利訴訟等。同時,企業還可以通過與合作伙伴建立專利聯盟、參與行業標準制定等方式來增強自身的專利實力和市場影響力。
在手術機器人這一賽道上,專利事務的復雜性和專業性要求極高,因此,尋找專注、高水平且聚焦此領域的專業人士和團隊顯得尤為重要。這樣的團隊不僅具備深厚的法律和技術背景,還能準確理解并把握手術機器人技術的核心要點和市場動態。他們的專業知識和經驗將為企業帶來準確、高效、高質且低成本的專利事務服務,助力企業在激烈的市場競爭中脫穎而出。
參考:搜狐網、Med TF、智慧醫械、我愛瓣膜、創械圈,協和醫學雜志,醫械一線,醫林研究院,時珍網,上海科技, 中國醫療設備,留學岡大,復旦大學附屬腫瘤醫院、動脈網、各大產品官網。