您當(dāng)前的位置:檢測(cè)資訊 > 科研開(kāi)發(fā)
嘉峪檢測(cè)網(wǎng) 2022-04-12 12:43
研究背景
根據(jù)機(jī)器人所使用的材料,可以將目前的機(jī)器人分為剛性機(jī)器人與軟體機(jī)器人。相對(duì)于剛性機(jī)器人,軟體機(jī)器人擁有更大的自由度,在靈活性上具有較大的優(yōu)勢(shì)。在過(guò)去的幾十年中,研究人員研究出了各種軟體機(jī)器人,實(shí)現(xiàn)了許多傳統(tǒng)機(jī)器人所難以實(shí)現(xiàn)的功能,如柔性抓取,仿生爬行等。軟體機(jī)器人的驅(qū)動(dòng)源也多種多樣,包括氣動(dòng),介電,化學(xué)物質(zhì)和折紙等。
折紙作為一門(mén)從二維到三維映射變換的藝術(shù),是一種從平面到空間非光滑復(fù)雜曲面的拓?fù)渫咦儞Q。折紙折痕的拓?fù)湫问剑约罢奂垯C(jī)構(gòu)方式變化,在各個(gè)研究領(lǐng)域中都一直受到研究者們的高度關(guān)注。其中,一類(lèi)構(gòu)型的折紙由Birtua Kresling提出,領(lǐng)域內(nèi)將其命名為Kresling折紙構(gòu)型,自然,相應(yīng)的折紙驅(qū)動(dòng)單元被命名為為Kresling驅(qū)動(dòng)單元。折紙機(jī)器人的機(jī)器人又分為:磁驅(qū),氣動(dòng),電磁電機(jī),形狀記憶合金式等。去除引線(xiàn)的束縛,磁驅(qū)的方式因?yàn)榭梢詿o(wú)線(xiàn)控制大大拓展了這類(lèi)型機(jī)器人的運(yùn)動(dòng)場(chǎng)合。
針對(duì)于醫(yī)療微創(chuàng)輔助設(shè)備應(yīng)用較為缺乏研究的前提下,研究團(tuán)隊(duì)提出了一種基于Kresling驅(qū)動(dòng)單元的磁驅(qū)折紙爬行機(jī)器人。為了拓展該類(lèi)型機(jī)器人對(duì)不同地形的適應(yīng)性,團(tuán)隊(duì)將該機(jī)器人的運(yùn)動(dòng)設(shè)計(jì)仿生于自然界的尺蠖昆蟲(chóng),加之磁場(chǎng)驅(qū)動(dòng)的優(yōu)勢(shì),將其進(jìn)行了結(jié)構(gòu)小型化設(shè)計(jì),使其具有基本的爬行和轉(zhuǎn)彎能力同時(shí),也具備藥物儲(chǔ)存和釋放的功能性,可應(yīng)用于微創(chuàng)輔助設(shè)備,大大拓展了該類(lèi)型機(jī)器人的應(yīng)用領(lǐng)域。
創(chuàng)新點(diǎn)
斯坦福大學(xué)的Ruike Renee Zhao團(tuán)隊(duì)報(bào)道了一種磁控式的折紙機(jī)器人。該團(tuán)隊(duì)在這項(xiàng)工作中通過(guò)有限元分析以及理論上推導(dǎo)和驗(yàn)證了爬行磁驅(qū)軟體機(jī)器人上運(yùn)動(dòng)時(shí)所需的扭矩值,然后通過(guò)磁場(chǎng)控制對(duì)爬行機(jī)器人的扭矩進(jìn)行控制,以實(shí)現(xiàn)對(duì)爬行機(jī)器人的前進(jìn)和轉(zhuǎn)向運(yùn)動(dòng)。同時(shí),磁驅(qū)的優(yōu)勢(shì)在于可以提供無(wú)線(xiàn)驅(qū)動(dòng),從而實(shí)現(xiàn)機(jī)器人的小型化和綠色能源化的機(jī)器人設(shè)計(jì)。最后,團(tuán)隊(duì)通過(guò)實(shí)驗(yàn)展示了機(jī)器人的藥物儲(chǔ)存和釋放能力,以此說(shuō)明了所提出的機(jī)器人可以勝任醫(yī)療微創(chuàng)輔助設(shè)備的工作,如運(yùn)輸和釋放藥物進(jìn)行靶向治療。
文章解析
文初,結(jié)合有限元仿真,團(tuán)隊(duì)對(duì)Kresling驅(qū)動(dòng)單元的爬行機(jī)器人的結(jié)構(gòu)進(jìn)行了詳細(xì)介紹,其中包括Kresling驅(qū)動(dòng)單元的驅(qū)動(dòng)原理,輸出扭矩。其中,爬行機(jī)器人如圖1所示圖片

圖1:基于Kresling驅(qū)動(dòng)單元爬行機(jī)器人構(gòu)型:(A) Kresling驅(qū)動(dòng)單元示意圖;(B) 由兩個(gè)具有反向折痕方向的驅(qū)動(dòng)單元制成的偶極子示意圖;(C) Kresling驅(qū)動(dòng)單元的扭矩實(shí)驗(yàn)測(cè)量曲線(xiàn);(D) 由兩個(gè)Kresling驅(qū)動(dòng)偶極子制成的爬行機(jī)器人示意圖;(E) Kresling爬行機(jī)器人驅(qū)動(dòng)所有單元所需的扭矩;(F) 對(duì)所有驅(qū)動(dòng)單元同時(shí)收縮時(shí)的有限元仿真驗(yàn)證結(jié)果。
根據(jù)以上機(jī)器人實(shí)現(xiàn)運(yùn)動(dòng)所需的扭矩分布結(jié)果,團(tuán)隊(duì)對(duì)應(yīng)布置了了四個(gè)磁化方向,用于分配爬行機(jī)器人的扭矩,以實(shí)現(xiàn)機(jī)器人的運(yùn)動(dòng):

圖2:爬行機(jī)器人的磁力驅(qū)動(dòng)機(jī)構(gòu); (A)爬行機(jī)器人樣機(jī);(B) 初始狀態(tài)和收縮狀態(tài)下的機(jī)器人結(jié)構(gòu)和磁化示意圖;(C)機(jī)器人收縮期間單元之間的扭矩比;(D) 40 mT 磁場(chǎng)強(qiáng)度下的機(jī)器人收縮示意圖;(E) 不同磁場(chǎng)強(qiáng)度下機(jī)器人收縮百分比值
在搭建完磁場(chǎng)后以及對(duì)機(jī)器人的收縮長(zhǎng)度進(jìn)行研究之后,團(tuán)隊(duì)展示了機(jī)器人在不同磁場(chǎng)強(qiáng)度下爬行機(jī)器人的運(yùn)動(dòng)特性,其中包括爬行機(jī)器人的步距和速度特性:

圖3:機(jī)器人的爬行機(jī)構(gòu);(A)爬行機(jī)器人在 40 mT 磁場(chǎng)強(qiáng)度下的單步步距;(B) 不同磁場(chǎng)強(qiáng)度和頻率下爬行運(yùn)動(dòng)的幅值和 (C)速度特性
在初步驗(yàn)證該機(jī)器人具有初步運(yùn)動(dòng)的能力后,團(tuán)隊(duì)開(kāi)始對(duì)提出的爬行機(jī)器人更為復(fù)雜的運(yùn)動(dòng)進(jìn)行相應(yīng)控制,讓機(jī)器人按照既定的路線(xiàn)進(jìn)行跟隨爬行運(yùn)動(dòng),包括轉(zhuǎn)彎和循跡:

圖4:爬行機(jī)器人的轉(zhuǎn)向和導(dǎo)航;(A) 爬行機(jī)器人的轉(zhuǎn)向原理;(B) 爬行機(jī)器人按照既定時(shí)間沿 “Z”路徑進(jìn)行循跡;(C) 機(jī)器人按照既定時(shí)間沿“O”形路徑進(jìn)行循跡
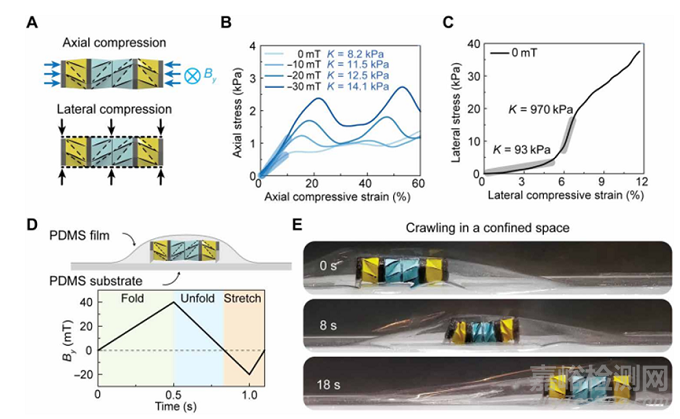
圖5:爬行機(jī)器人的各向異性特性;(A) 軸向和橫向壓縮施加示意圖;(B)在不同磁場(chǎng)下沿軸向的壓應(yīng)力-應(yīng)變曲線(xiàn);(C)在不同磁場(chǎng)下沿橫向的的壓應(yīng)力-應(yīng)變曲線(xiàn);(D)在密閉空間中爬行的示意圖;(E) 前進(jìn)運(yùn)動(dòng)
文末,團(tuán)隊(duì)開(kāi)展了爬行機(jī)器人運(yùn)輸藥物的實(shí)驗(yàn),以此來(lái)說(shuō)明該類(lèi)型機(jī)器人具備微小型藥物的運(yùn)輸和釋放能力,面向微創(chuàng)輔助設(shè)備,可以進(jìn)行靶向治療:

圖 6.爬行機(jī)器人的藥物運(yùn)載和釋放示意圖(藍(lán)色為藥丸);(A) 帶通孔結(jié)構(gòu)的改進(jìn)型爬行機(jī)器人的示意圖,通孔用于放置藥丸;(B) 爬行機(jī)器人在初始狀態(tài)和收縮狀態(tài)下的藥丸位置;(C) 所運(yùn)載的藥丸逐漸溶解在水中的過(guò)程示意圖
讀后感
基于上述特點(diǎn),折紙機(jī)器人未來(lái)將在工業(yè)生產(chǎn)、醫(yī)療救援、軍事探測(cè)等領(lǐng)域具有巨大的應(yīng)用前景。團(tuán)隊(duì)在本設(shè)計(jì)上,提出了一種可以運(yùn)輸和釋放藥物的磁驅(qū)式折紙機(jī)器人,使其在醫(yī)療微創(chuàng)輔助設(shè)備的應(yīng)用上有很大的應(yīng)用空間和工程背景。然而,這類(lèi)型的折紙機(jī)器人在極端環(huán)境因素下的動(dòng)態(tài)特性(如變形、穩(wěn)態(tài)頻響和瞬態(tài)響應(yīng)特性),目前還不得而知。此外,其極端力學(xué)特性在極端環(huán)境因素作用下,其響應(yīng)會(huì)發(fā)生變化,此時(shí)其理論建模,分析和實(shí)驗(yàn)也需要進(jìn)一步去探索。

來(lái)源:WEST可穿戴電子


