您當前的位置:檢測資訊 > 科研開發
嘉峪檢測網 2022-08-14 23:12
一、引言
隨著《中國制造2025》的推進,智能制造蓬勃發展,工業制造的精度和質量控制也將更加嚴格。為了維持工業制造的生產水平,很多企業都建立了內部或第三方實驗室來實現質量把控。而實驗室的質量把控在很大程度上取決于用以進行檢測或校準的儀器設備的量值溯源,即采用準確可靠的計量器具對被測量進行測量。因此,研究適用于智能制造的測量不確定度新型評定方法并做好測量結果的測量不確定度評定,對于提升制造業中的生產質量水平和檢測水平具有極大的推動作用,對于支撐國民經濟高質量發展也具有重要意義。
二、GUM法和蒙特卡洛法的現狀及問題
依據目前的計量技術規范JJF1059,通用的測量不確定度評定方法有兩種,GUM法和蒙特卡洛法(MCM)。GUM法是一種應用測量不確定度傳播律的方法,該方法是國際組織ISO/IEC在GUIDE98-3:2008《測量不確定度表示 第3部分 測量不確定度表示指南》中推薦采用的。在采用GUM法進行測量不確定度評定的流程中有一個關鍵步驟,就是要建立測量模型。測量模型的建立是基于測量方法,考慮不確定度對被測量的影響而定的,反映了測量結果與其直接測量的量、引用的量以及影響量等有關量之間的數學關系。GUM法主要適用于測量模型為線性函數的情形,當測量模型為非線性的函數時,需要采用泰勒級數展開并忽略高階項,將被測量近似為輸入量的線性函數。正是由于GUM法的適用范圍受限,不能處理明顯呈非線性的測量模型,其替代方法MCM產生。MCM是利用概率分布的隨機抽樣而進行不確定度傳播的方法,主要適用于各不確定度分量大小不相近、測量模型明顯呈非線性以及輸出量的概率密度函數明顯非對稱等情況。對于物理量測量,測量模型一般根據物理原理確定。而對于非物理量或不能用物理原理確定的情況,一般由實驗方法確定或給出數值方程。在可能情況下,盡可能地由經驗模型給出。某些情況下,輸出量的每個輸入量可以看作被測量,也可能取決于其他量,從而導出十分復雜的函數關系。在測量不確定度評定中,GUM法和MCM主要是對測量模型能夠顯式表達的系統進行評定。
然而,隨著現代信息技術的發展,人工智能技術與制造業深度融合,在產品的校準檢測環節,測量不確定度評定所需建立的測量模型更為復雜。究其原因,主要在于有些現有計量器具自身的系統比較復雜,采用新技術之后的計量器具測量原理變得不清楚,或者利用新技術制造的新的測量裝置系統原理模糊等。相關的計量器具主要應用在動態視頻和靜態圖像識別、人臉識別、模式識別等領域,如生產線質量缺陷檢測、機械臂自動定位抓取零部件、無人駕駛汽車視覺感知系統、智能汽車動力系統、高速測速拍照系統等。系統變得更為復雜的結果就使得測量模型無法由物理原理或經驗方程給出,更不能由函數公式顯式表達,因而傳統的測量不確定度評定方法就不適用了。
三、深度學習
深度學習是機器學習研究中的一個新領域,在處理大數據方面很有優勢。在復雜系統模型未知的情況下,深度學習可以運用算法從原始數據中提取信息,將系統用某種類型的模型表示,并使用該模型對其他數據進行推斷,這是深度學習算法最主要的特點。近年來,深度學習的發展逐漸成熟,很多復雜函數都可以通過運用深度學習算法表示。而且深度學習已經廣泛應用在語音識別、圖像識別、人臉識別、自然語言處理等領域,同時也出現在了現代制造業的眾多生產檢測環節中。
因此在測量系統的理論模型不清楚或測量系統過于復雜而無法建立測量模型的情況下,采用深度學習算法來擬合復雜系統,建立測量模型是可行的。
四、測量不確定度的深度學習評定方法
測量不確定度的深度學習評定方法分為數據收集、深度學習模型訓練、模型不確定度評定、蒙特卡洛方法模擬等步驟。
1.數據收集
針對特定的復雜系統,盡可能多地收集與被測量相關的數據,形成數據集。例如針對智能汽車障礙物識別系統,收集不同溫度、濕度、氣候、路況、電磁場、光照、速度和障礙物等相關參數,形成數據集;或者針對人臉識別系統,收集不同背景、光照、面部、頭部裝飾物下的人臉數據,形成數據集。
2.深度學習模型與測量模型的關系
目前有PaddlePaddle、Tensorflow、Caffe、Theano、MXNet、Torch和PyTorch等多種深度學習框架工具,用于快速構建深度學習程序。在這些框架下有許多深度學習模型,如卷積神經網絡(Convolutional Neural Network, CNNs)、深度置信網絡(Deep Belief Network, DBNs)和堆棧自編碼網絡(Stacked Auto-Encoder Network, SAE)模型等。
深度學習算法,其基本原理是通過輸入層的大數據和輸出層對應結果,訓練構建一個復雜的參數隱層,從而形成一個深度學習模型實例。在使用時,當有未知結果的一組輸入層數據輸入該深度學習模型實例后,依據模型實例隱層參數就可以計算出對應的結果,如圖1所示。
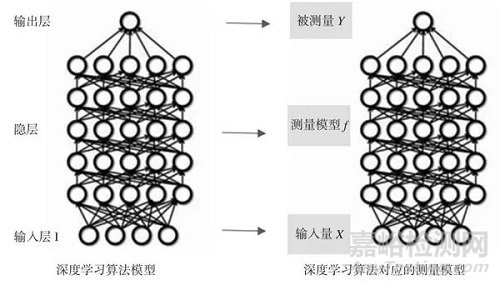
圖1 深度學習算法模型與測量模型的關系
從測量模型而言,深度學習模型的輸入層I就對應著測量模型的輸入量X;深度學習模型的隱層就對應著測量模型f;深度學習模型的輸出層就對應著測量模型的被測量Y,如圖1所示。
在測量上可以理解為當測量模型f未知時,如何對被測量Y進行測量不確定度評定。
3.測量模型f的求取,即深度學習模型實例的訓練
對于不同的復雜系統,比如汽車動力系統、圖像識別系統和模式識別系統等,用同一種深度學習算法模擬可能會產生截然不同的效果,選取不同的激活函數、不同的神經網絡層數、每層不同的神經元個數或參數個數,都會對測量產生不同的影響。因此在進行深度學習訓練時,依據如下過程開展:
(1)將收集到的數據分為訓練集T和驗證集V。
(2)從PaddlePaddle、Tensorflow、Caffe、Theano、MXNet、Torch和PyTorch等工具中選定深度學習框架。
(3)選定深度學習模型,如從CNNs、DBNs或SAE等模型中選取一個進行編程。
(4)使用訓練集T進行訓練,并獲得模型實例。
(5)使用驗證集V驗證模型實例。
(6)獲得深度學習模型實例f及估算其可能影響的概率分布DMPF(分布的相關特征值和概率由深度學習工具提供或估算)。
該深度學習模型實例即隱式的測量模型f,并且工具給出的模型實例的概率分布就是該測量模型的測量不確定度的概率分布。
4.利用已有的蒙特卡洛方法進行被測量Y的測量不確定度評定
對于已知輸入量X的測量,要求得被測量Y,并求其相應的測量不確定度。由于測量模型f的隱式特性,因而需要采用蒙特卡洛方法進行。其方法如下:
(1)對輸入量X中的每個分量xi(i=1,2,……,n),求其相應測量數據的均值,并使用B類方法和A類方法評定其標準合成測量不確定度。
(2)使用蒙特卡洛方法依據輸入量每個分量xi(i=1, 2,……,n)的概率分布和標準合成測量不確定度,生成對應的隨機數xij, i=1, 2,……, n;j=1,2,……, m。
(3)對于1≤k≤m,如取j=k,從xij中抽取x1k,x2k,……, xnk,形成一組輸入量數據(x1k,x2k,……, xnk),將該組數據輸入深度學習模型實例f,獲得一個待測量值yk,并且可由深度學習模型實例計算出yk的概率分布DMPFk,直到生成m個yk和對應的概率分布DMPFk。
(4)按1……k……m的順序,依據yk和其對應的概率分布DMPFk,使用蒙特卡洛方法生成l個ykp(p=1,2,……, l),共生成m×l個Y的模擬值。
(5)求取m×l個ykp(k=1,2,……, m;p=1,2,……, l)的均值作為被測量Y的估計值,其分布作為被測量Y的分布,其標準差作為被測量Y的標準測量不確定度。
上述過程,即為測量不確定度的深度學習評定方法,其流程如圖2所示。

圖2 測量不確定度的深度學習評定方法
五、結束語
本文從理論上提出了一種對于不可顯式表達的復雜測量的測量不確定度評定方法,對智能制造、人工智能等技術的質量提升具有顯著意義。

來源:計量資訊速遞


