您當前的位置:檢測資訊 > 科研開發
嘉峪檢測網 2024-08-24 14:17
摘 要
針對工業生產中滾動軸承剩余使用壽命(RUL)預測任務中數據挖掘不足導致預測精度低的問題,提出了一種多通道融合的滾動軸承剩余壽命預測方法。
該方法通過互補集合經驗模態分解(CEEMD)對原始振動信號進行降噪化處理和特征增強并將其作為模型輸入;構建三通道網絡模型,引入 3 種不同的神經網絡:時間卷積網絡( TCN)、卷積長短時間記憶網絡(ConvLSTM)、雙向門控循環單元神經網絡(Bi-GRU),從時序、空間、感受野等多維度對特征進行差異化提取;在結構基礎上添加多頭注意力機制(multi-head attention mechanism,MA),重新調整網絡輸出權重、加快模型收斂速度;最后,設計一個特征融合輸出模塊,實現對滾動軸承剩余壽命預測。在兩種數據集上進行實驗驗證,并與其他文獻中先進模型進行對比。
結果表明,所提模型能夠更準確地捕捉軸承壽命退化曲線并且在多種評價指標上均優于對比模型。
引 言
針對當下研究的局限性,提出了一種多通道融合的滾動軸承剩余壽命預測模型。
主要貢獻有 3 個方面:
1)引入了一種改進的信號處理方法:互補集合經驗 分解互補集合經驗模態分解 (CEEMD)算法,對振動信號 進行模態分解和降噪。
2)提出了一種多通道網絡融合框架并引入 3 種傳統 網絡的改進網絡,對輸入特征通過時序、時間、空間等多 種維度進行深度挖掘并自適應各自學習到的權重。
3)為了加快模型訓練收斂速度,引入一種目前熱門 的大語言模型 Transfomer 中的注意力機制:多頭注意 力機制,將網絡學得的多種特征權重映射到子空間,進行 權重重構,重點關注對于退化趨勢影響大的特征,找到最 佳的優化方案。
為了驗證所提方法的有效性,分別通過 PHM2012 公開軸承數據集和實驗室自采集數據集進行驗證。
1、RUL 預測模型
1. 1 預測方法整體框架
提出基于多通道融合的滾動軸承 RUL 預測方法框 架如圖 1 所示:

主要包括數據預處理和網絡預測兩部分。數據預處理包含振動信號時、頻域分解、互補集合經驗模態分解、標準化及時間窗處理,將預處理后的特征輸入到搭建的多通道融合網絡中,得到最終的預測值。
1. 2 算法介紹
1)互補集合經驗模態分解
CEEMD 信號分解方法,其主要計算過程包括如下3方面:
(1)在原始振動序列 C 上添加 a 組互為相反數的正 負噪聲對,得到新的序列 I1 、I2 。

2)時間卷積神經網絡
為了使得神經網絡能夠對序列數據進行時 間建模,引入 CNN 的一種變體即 TCN,其由膨脹因果卷 積和殘差模塊組成。在解決時序問題上,需要追溯歷史信息,歷史信息越久遠,隱藏層越多,計算量越大。為了既能夠增大感受野又不使得隱藏層過多,膨脹因果卷積引入了一個新的超參數—擴張率 d ,在不損失信息的情況下,允許模型間隔 采樣。殘差模塊使信息能夠跨越層數傳遞,從而避免層數過多而造成信息損失。
3)卷積長短時間記憶網絡
許多研究證明,LSTM 在剩余壽命預測領域的有效 性,但是其本身由于復雜的結構導致計算復雜度高并且 對于更加長期的關系依賴建模仍存在不足。因此引入ConvLSTM,在 LSTM 結構的基礎上加入了卷積結構,使其不僅有著稀疏連通性和參數共享的優點,在計算速度提 高的同時還能夠捕獲數據長期依賴關系。
4)雙向門控循環單元神經網絡
它在門控循環單元神經網絡(GRU)的基礎上增加了反向循環機制,從而實現雙向時間 信息的處理。Bi-GRU 能夠同時考慮前向和后向的隱藏 層信息,比 GRU 具有更強大、更穩定的特征學習能力。
5)多頭注意力機制
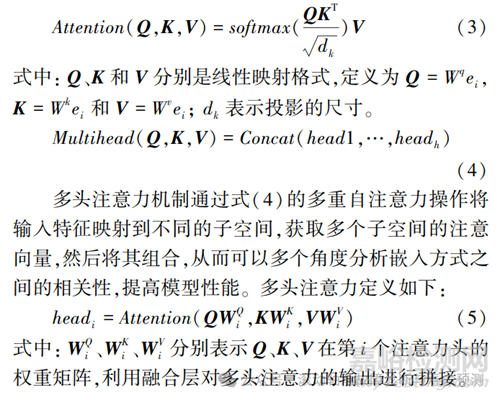
1. 3 整體網絡結構
多通道融合網絡整體結構由三通道網絡特征提取模 塊、多頭注意力模塊及 FNN 預測模塊組成,如圖 2 所示:
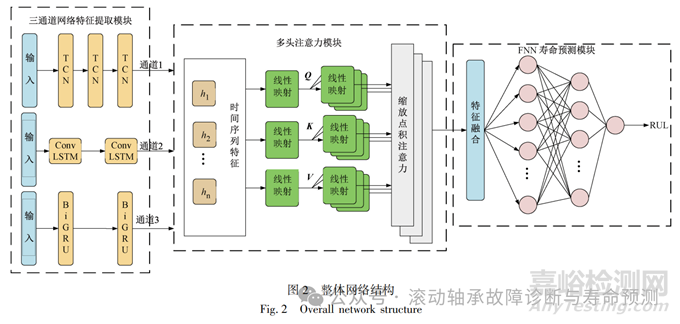
3 種網絡模型利用各自的優勢學得不同的時序特征,由 多頭注意力模塊將學得的特征映射到不同的子空間,重新分配特征權重,重點關注對于退化趨勢影響大的特征向量,最后將所有特征融合,通過 FNN 模塊將特征映射 輸出得到最終的 RUL 預測值。
2、實例分析
為驗證多通道融合的預測方法在發動機剩余壽命預 測中的有效性,基于 Python3. 8 和 TensorFlow2. 0 框架進行實驗驗證。
2. 1 實例 1:PHM2012 公開數據集
本實驗采用 PHM2012 數據挑戰發布的軸承完整壽命周期數據集。如圖 3 所示,在 PRONOSTIA 實驗平臺上通過水平和垂直位置的加速度傳感器來收集兩個方向的振動信號。

設定設備的采樣頻率為 25. 6 kHz,每間 隔 10 s 記錄一次數據,每次采集數據時長為 0. 1 s。從實 驗安全的角度考慮,當振動數據的振幅超過 20 g(1 g = 9. 8 m / s²)時,停止實驗。
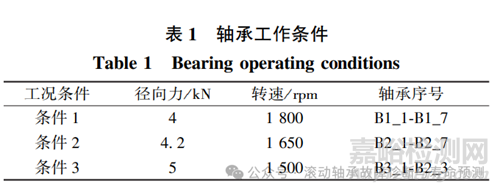
如表 1 所示,數據集共采集 3 種工況條件下的 17 組數據。
訓練集和測試集包含每個軸承的全壽命歷史振動數據,每個采樣周期包含 2560 個振動數據。本次實驗對于同一工況的軸承,采用“留一法”,將目標軸承數據作為測試集,將其他軸承數據設為訓練集。
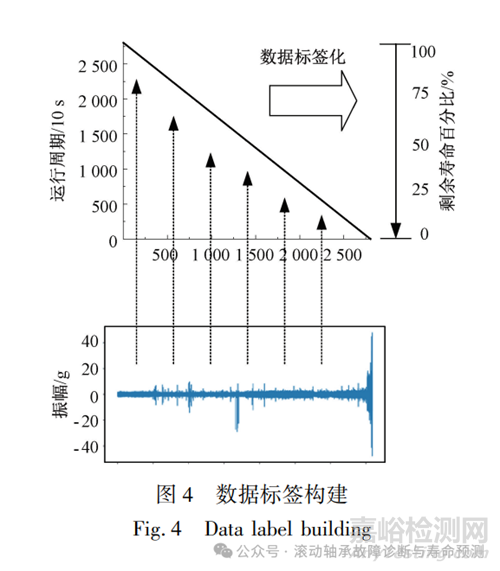
如圖 4 所示,將整個軸承的生命周期定義為從 1 ~ 0 的均勻下降直線并以此作為軸承訓練的訓練標簽。
1)評價指標

由定義可知,更低的 MAE 和 RMSE 代表更好的預測 結果。
2)參數設置
經過多次實驗,模型中 TCN 模塊、ConvLSTM、BiGRU 模塊的具體結構和參數設置如表 2 所示。

所提模型中的多頭注意力機制涉及到注意力頭數的選擇,不同頭數對于預測精度是有一定影響。
為了探究精度最高的參數設置方案,本文設置不同注意力頭數:1、 2、4、8、16、32、64、128 共 8 種情況。為了防止偶然性,對 每一種情況運行實驗 5 次取平均,得到其預測結果的 MAE 值和 RMSE 值如圖 5 所示:
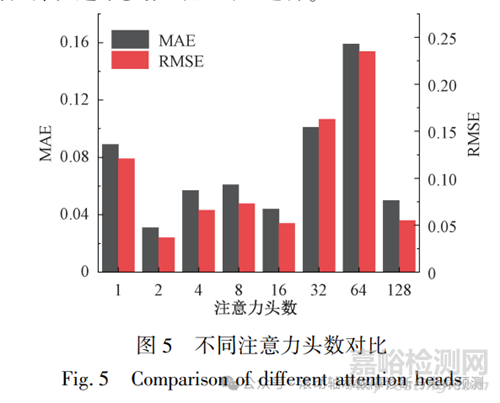
可以看到,不同注意力 頭數對應的預測精度不同且差異較大,注意力頭數的增 加與準確度的提高沒有正負相關性,在本文實驗中,當注 意力頭數為 2 時的預測模型精度最高,因此本文后續的 實驗都在這個參數的基礎上進行。
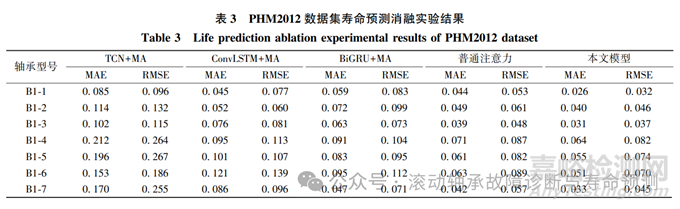
3)消融實驗
為了驗證所提多通道融合的預測方法相比于原始模 型改進的有效性。將本文模型進行部分模塊拆解,構成4 種消融模型: TCN + MA 模型、 ConvLSTM + MA 模型、 BiGRU+MA 模型、多通道+普通注意力模型。
本文在工況 1 的條件下,測試 7 個軸承的 RUL,每個 軸承的預測實驗重復 5 次并取平均值得到最終的預測誤 差。評價指標對比結果如表 3 所示:
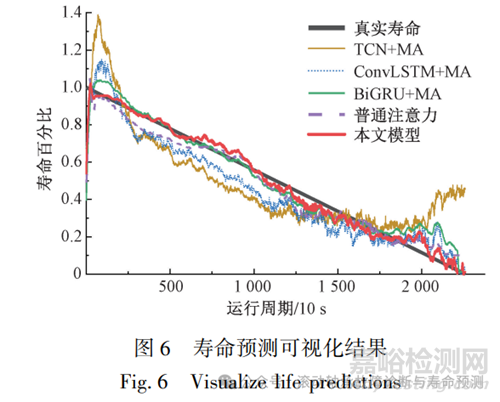
如圖 6 所示,為了能夠更加直觀地顯示本文模型相 較于其他消融模型的優越性,以軸承 B1-7 為例,對剩余壽命預測進行可視化分析。
4)對比實驗
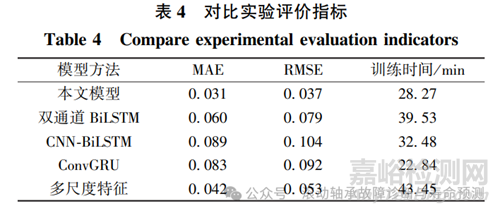
為了驗證本文提出模型的優越性,分別構建了其他 文獻中提出的 4 種優秀深度學習方法進行對比:雙通道BiLSTM 模 型 [14]、 CNN-BiLSTM 模 型[20]、 ConvGRU 模 型[21]、多尺度特征模型[22],并從 MAE、RMSE、時間 3 個 維度進行分析。在 FD001 測試集上進行誤差比較,以軸 承 1-3 為例,所得結果如表 4 所示
2. 2 實例 2:實驗室自采集數據集
為了驗證本文提出的多通道壽命預測模型的泛化性能,運用實驗室軸承壽命預測實驗平臺對測試軸承進行全壽命周期振動信號的數據采集并用于壽命預測。
實驗平臺如圖 7 所示,該平臺由變速驅動電機、軸承、齒輪箱、軸、偏重轉盤和調速器等組成。

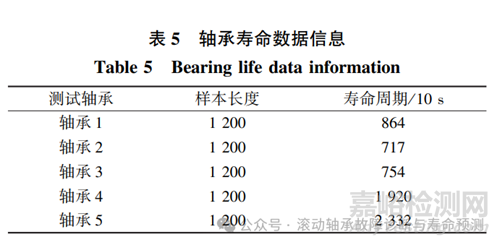
選取軸承型 號為 N205,數字信號的采樣頻率為 12 kHz,間隔 10 s 采 樣,每次采樣 0. 1 s。實驗安全的角度考慮,當振動數據 的振幅超過 20 g(1 g = 9. 8 m / s2)時,停止實驗。
在上述工作條件下,共采得 5 組軸承全周期壽命振 動數據,如表 5 所示。本實驗對數據集的劃分以及標簽 處理與前文實驗相同。
對 5 個測試軸承進行剩余壽命預測,其可視化結果 如圖 8 所示:

為了能夠更加直觀地顯示本文模型相較于其他對比 模型的優越性,以軸承 5 為例,對剩余壽命預測進行可視化分析。如圖 9 所示:

3、結 論
針對現有數據驅動方法在滾動軸承剩余壽命預測中 對振動信號特征挖掘深度不足導致預測精度不高的問 題,提出了一種基于多頭注意力機制和多通道模型融合 的滾動軸承剩余壽命預測方法。
首先將原始振 動信號進行時、頻域分解并運用 CEEMD 將特征信號進 行降噪、 增強。
然后, 構建三通道網絡結構: TCN、ConvLSTM、BiGRU,對特征信號從時間、空間、時序等多個維度進行深度挖掘,提取其高維退化特征。
最后結合 多頭注意力機制,將高維特征映射到子空間進行權重調 整和融合,最終實現對滾動軸承剩余壽命的回歸預測。
通過在 PHM2012 和實驗室平臺數據集的實驗結果表明, 相比于 ConvGRU、CNN-BiLSTM、雙通道 BiLSTM 等數據 驅動方法,本文模型在預測精度上有著明顯的提升,在時 間維度上,相較引文的雙通道、多特征模型也有較大提 升,是一種高效的滾動軸承剩余壽命預測方法。
雖然經過實驗驗證,本文模型在多種工況下都有著 良好的預測精度,但是并未考慮到 1工況訓練、2工況測試這種跨工況問題,這是深度學習在滾動軸承剩余壽命預測領域的難點也是下一步工作應該探究的重點。
參考文獻:
車魯陽,高軍偉,付惠琛.基于多通道融合的滾動軸承剩余壽命預測[J].電子測量與儀器學報, 2023(12).

來源:滾動軸承故障診斷與壽命


